
Du biomimétisme pour l’amélioration des techniques de forage ?
On peut lire cette actualité sur le bulletins-electroniques.com émit par l’Association pour le Développement de l’Information Technologique:
Le domaine pétrolier est souvent victime d’une mauvaise image auprès des défenseurs de la nature. Or, de nouvelles études inspirées d’organismes naturels pour l’amélioration des techniques de forage sont en cours ; celles-ci pourraient, pour une fois, rapprocher les deux parties. C’est le cas des escargots et des palourdes dont le mode de déplacement a attiré l’attention du Professeur Anette Hosoi, à l’Institut de Technologie du Massachussetts (MIT). En effet les escargots peuvent se déplacer dans toutes les directions et sur des surfaces variées grâce à leur mucus qui leur permet une bonne adhésion à de nombreux supports. En partant de ce constat l’équipe du Dr. Hosoi a mis au point un robot appelé “RoboSnail” capable de grimper des murs et de rester accroché sur des surfaces à l’envers ce qui peut avoir des applications en forage de puits pétroliers. De même, ils ont développé un robot “RoboClam” inspiré de la palourde qui peut plonger et se terrer dans le sable avec une consommation en énergie bien moindre que les équipements et technologies actuelles pour les forages. La compréhension de son fonctionnement pourrait permettre de développer un dispositif automatique. Cette étude “pourraient, pour une fois, rapprocher les deux parties.” Et bien non ! Je crois que l’auteur de cette article manque un point crucial. Les défenseurs de la nature ne s’opposent pas seulement à l’emploi de techniques dangereuses pour l’environnement, mais soutiennent un développement qui ne soit pas basé sur l’exploitation des ressources non renouvelables de notre Terre telles que les ressources fossiles. Je trouve le sujet d’étude de l’équipe du MIT néanmoins très intéressant. Bien qu’elle serve à améliorer les techniques de forage leur étude a mené à d’autres applications moins huileuses ! La solution : ancrer le planeur marin au fond ! Mais voilà, les ancres traditionnelles sont trop lourdes et trop volumineuses pour être installées à bord des planeurs sous-marins. Il était donc nécessaire à l’équipe du MIT de réfléchir à une autre manière d’ancrer l’engin. Et toute personne qui s’est amusée à creuser le sable humide sur une plage sait que plus on creuse plus c’est difficile. Et le sable au fond de la mer c’est pareil, plus on creuse plus c’est compact. Ce qu’a alors fait l’un des étudiants en thèse de l’équipe de recherche est de lire environ 400 articles de biologie pour répertorier les stratégies d’ancrage des organismes biologiques marins. Au final, l’équipe a conclu que les mollusques bivalves de type couteaux étaient les plus intéressants à imiter. Comme on peut le voir sur la vidéo, ils sont champions pour s’enfoncer dans le sable mouillé. L’équipe du Dr Hosoi a été contactée par la compagnie Bluefin qui construit des planeurs sous-marins autonomes (en forme de torpilles) qui servent à faire des mesures scientifiques (températures, pressions, courants, polluants, … bref plein de données utiles). Bluefin leur a soumis leur problème : comment faire en sorte que les planeurs restent en sustentation au dessus d’un point défini du fond marin ? En général, ces petits engins dérivent plus ou moins lentement à cause des courants. Fâcheux quand on collecte des données en des endroits précis ! La solution classique est d’embarquer un capteur de position couplé au moteur à propulsion qui corrige sans cesse la position du planeur. Mais voilà cela demande des capacités de calcul importantes et consomme beaucoup d’énergie.
L’équipe du Dr Hosoi a été contactée par la compagnie Bluefin qui construit des planeurs sous-marins autonomes (en forme de torpilles) qui servent à faire des mesures scientifiques (températures, pressions, courants, polluants, … bref plein de données utiles). Bluefin leur a soumis leur problème : comment faire en sorte que les planeurs restent en sustentation au dessus d’un point défini du fond marin ? En général, ces petits engins dérivent plus ou moins lentement à cause des courants. Fâcheux quand on collecte des données en des endroits précis ! La solution classique est d’embarquer un capteur de position couplé au moteur à propulsion qui corrige sans cesse la position du planeur. Mais voilà cela demande des capacités de calcul importantes et consomme beaucoup d’énergie.
Ils peuvent atteindre une profondeur de 70cm. Or les mesures montrent que les forces que peut exercer ce mollusque sur le sable compact sont 75 fois plus faibles que celles nécessaires pour creuser jusqu’à de telles profondeurs. Et comme le dit le professeur Anette Hosoi, il lui faut juste l’énergie d’une pile de 1.5V pour se propager dans le sable horizontalement sur une distance de 500m. Alors comment fait-il ?
Le mollusque fluidifie le sable ! Il rend le sable mouvant autour de lui. Voici comment il s’y prend :
Le bivalve commence avec son pied complètement étendu au-dessous de ses coques. Il se soulève puis contracte ses deux moitiés de coque ce qui a pour conséquence de puiser l’eau du sable vers le corps de l’animal. Le sable devient moins compact, se fluidifie localement et forme un lit fluidifié au-dessous de l’animal. La contraction des valves provoque le gonflement du pied par afflux de sang. Le sable se stabilise et redevient compact autour du pied qui sert alors d’ancre. Les muscles du pied tirent alors le reste du corps vers le bas. Les coques s’ouvrent à nouveau, le pied dégonfle et le cycle peut recommencer.
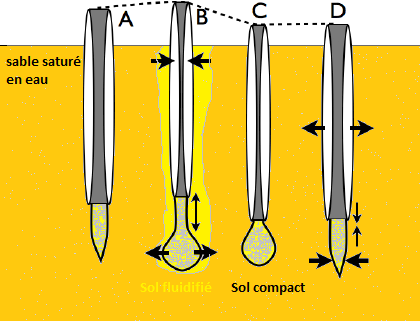
Bien que le bivalve soit trop faible pour tirer sa coquille dans le sable statique qui exerce une résistance qui augmente linéairement avec la profondeur, la fluidification réduit considérablement cette résistance la rendant indépendante de la profondeur. Le couteau s’enfonce sans dépense excessive d’énergie puisque l’énergie nécessaire pour fluidifier le sable est bien plus faible que celle nécessaire à s’enterrer dans un sable qui resterait compact.
Ayant compris ces principes de propagation l’équipe du MIT s’est employé a construire des petits automates très légers capable de s’enfoncer dans le sol et de jouer le rôle d’ancre.
A noter qu’un planeur sous-marin Bluefin va quadriller une petite zone du plancher océanique à 4500 m de fond pour retrouver les boites noires du Boeing de la Malaysia Airlines.
Voici une petite vidéo explicative des recherches du MIT (en anglais) :

